摘要:注塑機專用機械手是模仿人類手臂的結構與動作,代替人類完成取件作業以實現注塑機的自動化生產。本文設計的注塑機專用機械手以西門子小型PLC作為控制器,配合注塑機的生產過程���,實現塑料制品的取出并放置到指定位置����。
本文研究設計注塑機取件機械手[1-2]����,選用PLC作為主控制器,實現注塑機中塑料制品取出[3]��。注塑機專用機械手實現手臂伸出—手臂下降—吸盤吸取—手臂上升—手臂縮回—手臂下降—吸盤松開—手臂上升等動作配合注塑機完成注塑生產���。
1.系統硬件設計
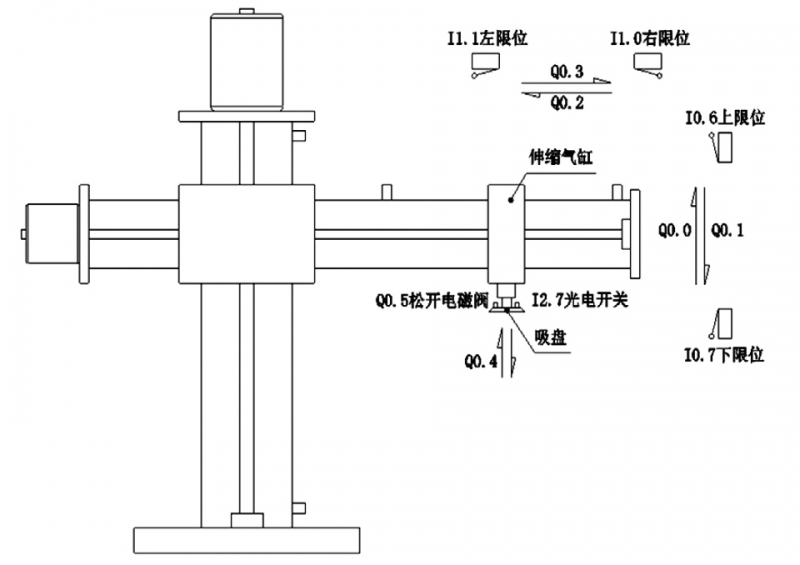
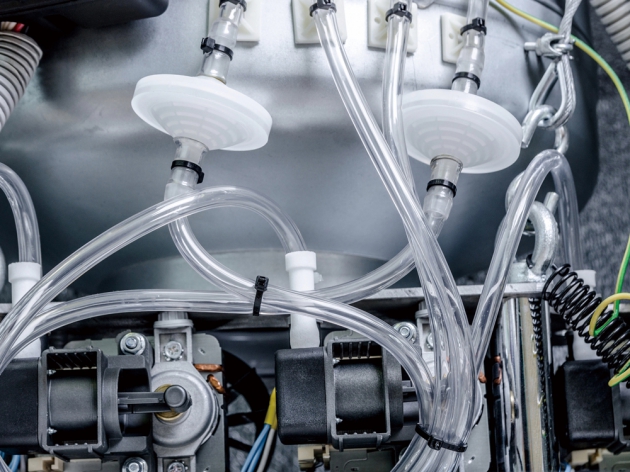
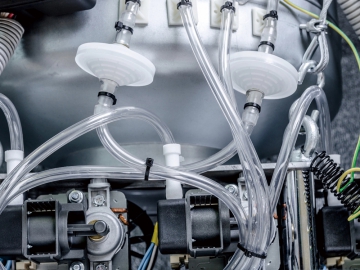
注塑機機械手主要是配合注塑機完成注塑生產�,對精度要求相對較低,選擇三相異步電機作為驅動電機��,位置控制通過限位開關實現����。因塑料制品重量輕但易損壞,選擇吸盤而不是硬件夾緊的方式抓取工件�����,不僅動作迅速�����、結構簡單,還可以有效地避免了夾損工件。同時吸盤的抓取處設有光電傳感器����,主要用來檢測是否成功吸取或者釋放工件����。注塑機機械手的硬件設計如圖1所示����。
圖1 注塑機專用機械手的硬件
2.系統的軟件設計
1)公用程序
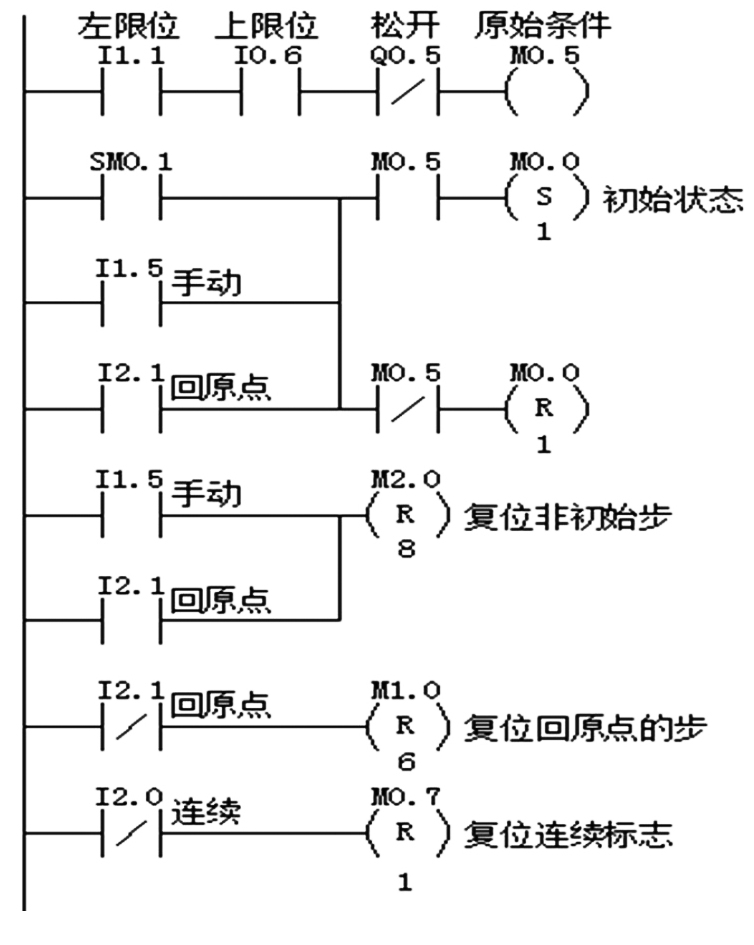
公用程序主要完成初始化,并負責手動、自動等工作方式切換的協調工作�。公用程序如圖2所示��,主要實現以下功能:①在自動工作方式下,必須從原點位置開始執行,若不在初始位置���,則自動程序不執行;②當處于手動或者回原點工作方式時,復位非初始步即除初始步以外的各步對應的位存儲器,確保系統不會在自動切換到手動后又返回自動工作方式時存在兩個活動而不出現異常狀況。
2)手動程序
如圖3所示:①電動機的正反轉互鎖,如機械手上升與下降互鎖�、伸出與縮回�;②位置保護�,如用限位開關限制機械手的升降伸縮范圍;③安全保護��,如通過限位開關確保機械手只在高位才能伸縮��;只在最左或最右位置才能上升下降以及松開工件�。
3)自動程序
自動程序設計主要考慮與注塑機協調工作���,機械手收到注塑機開模完成塑料制品的加工信號時�,開始按照自動程序設計的動作開始執行取件工作,同時切斷閉模信號,確保機械手取物的時候注塑機不工作,以確保其安性全。同時為了避免出現抓取失敗的情況�����,通過光電傳感器來檢測物體是否抓取成功���。機械手的動作順序功能圖如圖4所示�����。
圖2公用程序

圖3手動程序
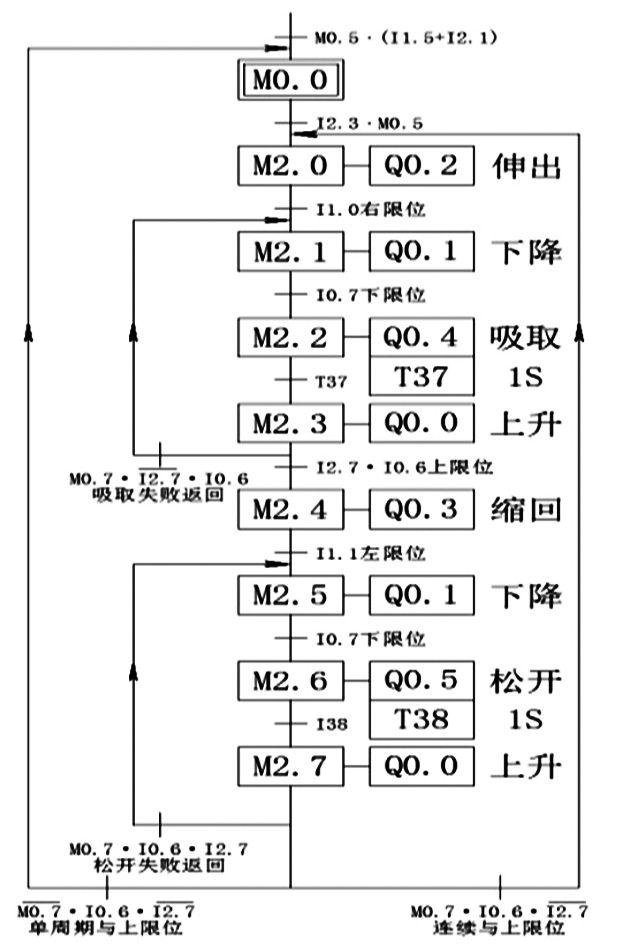
圖4自動程序順序功能圖
3.結束語
本設計使用的是注塑機專用機械手,采用基于PLC作為主控制器�,具有體積小����、響應速度快��、可靠性高�、易于維護��、并隨時可依生產工藝的不同要求而隨機修改等諸多優點�,可有效的,完成塑料制品的取出��,實現自動化生產����。





















 玻纖含量對長玻纖...
玻纖含量對長玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫療干粉吸入...
聚砜醫療干粉吸入...