李鐵軍,戴 騏,楊若曦,馬 濤,劉今越
( 河北工業(yè)大學 機械工程學院,天津 300130)
摘 要: 模仿人體手指的構(gòu)造,制作了一種以不同硬度的聚二甲基硅氧烷( PDMS) 為外層材料,聚偏氟乙烯( PVDF) 為傳感元件的柔性觸覺傳感器,利用電荷放大器采集傳感器與五種常見物體接觸并滑動時產(chǎn)生的振動信號,對信號進行選取、濾波、提取特征值等處理,結(jié)合分類算法,對物體材質(zhì)進行辨識分類。實驗證明,此傳感器對5種常見物體材質(zhì)的識別率可以達到 90 % 以上。
關(guān)鍵詞: 觸覺傳感器; 聚二甲基硅氧烷; 聚偏氟乙烯; 材質(zhì)識別
0引 言
觸覺作為機器人與外界環(huán)境重要的接觸感知方式,從 20 世紀 70 年代起引起了學者們的廣泛研究[1]。不同團隊從壓力、接近覺、滑覺、溫覺等方面對觸覺傳感器進行了研究[2]。按工作原理劃分,觸覺傳感器主要分為壓電式、壓 阻式和電容式,其中,壓電材料具有響應(yīng)頻率高的特點,更 適合對振動信號的獲取[3]。壓電材料可分為無機壓電材料(壓電晶體和壓電陶瓷)和有機壓電材料—聚偏氟乙烯( polyvinylidene fluoride,PVDF) ,PVDF 材料材質(zhì)柔軟,形變能力大,且具有比壓電陶瓷更高的壓電電壓常數(shù),因此常被用于感知振動的柔性傳感器的制作中[4]。在柔性材料選擇方面,聚二甲基硅氧烷( polydimethylsiloxane,PDMS)是一種疏水類的有機硅物料,常溫下為油狀液體,與固化劑混合后可以固化,固化后有較好的彈性,且可通過調(diào)整 PDMS 基本組分與固化劑的質(zhì)量比(下文中的質(zhì)量比均指 PDMS 基本組分質(zhì)量: 固化劑質(zhì)量) 改變硬度,適合作為柔性傳感器的外層材料。人類手指主要由指骨、皮膚、指甲等組成,其 中皮膚分為表皮層、真皮層和皮下組織,皮下組織以脂肪為主[5]。不同的研究均表明,作為直接與外界接觸的表皮層,其楊氏模量要大于真皮層[6]。在皮膚內(nèi)存在四種觸覺小體,可以對不同的刺激產(chǎn)生不同的響應(yīng),其中帕西尼氏小體對振動比較敏感[7]。
本文模仿人體指尖結(jié)構(gòu),以 PVDF 壓電薄膜材料為傳感元件制作了一種仿生柔性觸覺傳感器,可將其用于機械 臂末端,通過分析傳感器與材料表面滑動時產(chǎn)生的振動信 號對物體材質(zhì)進行分類識別。
1結(jié)構(gòu)設(shè)計
基于仿生思想,參考人類手指生物特征設(shè)計傳感器結(jié) 構(gòu),如圖1所示。整體由一個圓柱體和位于頂部的半球體組合而成,仿指骨部分位于傳感器內(nèi)部,由聚乳酸( poly- lctic acid,PLA) 材料通過3D打印方式制作而成,提供傳感器的支撐與連接功能。仿皮膚層部分覆蓋于仿生手指的表面,由內(nèi)外兩層 PDMS 材料構(gòu)成,內(nèi)層包含一個邊長為10 mm 的正方體,考慮到當 PVDF 薄膜與接觸平面平行放置時,其對振動信號感知效果并不理想[8],因此,本文選擇在 PDMS 正方體與接觸平面垂直的相對兩側(cè)面各設(shè)置一個PVDF 壓電薄膜,以提高傳感器穩(wěn)定性,當一個傳感元件失效時,另一側(cè)傳感元件仍舊正常工作,保證傳感能力有效。最外層用較硬的 PDMS 將傳感器包裹起來。綜合考慮材料的制作工藝及機械強度因素,兩層 PDMS 厚度均為 1 mm。
圖 1 傳感器結(jié)構(gòu)示意圖
2傳感器樣機研制及測試
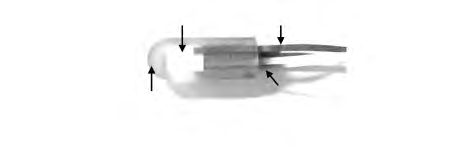
裁剪兩塊 10 mm × 15 mm 大小的 PVDF 壓電薄膜作為傳感元件,其中 10 mm × 10 mm 的正方形區(qū)域為主要感知部分, 剩余 5 mm × 10 mm 長方形區(qū)域做為引線導出預留部分,為了避免高溫破壞 PVDF 材料結(jié)構(gòu),采用導電膠帶引出電極。用模具制作 10 mm × 10mm × 10 mm 的 PDMS 正方體小塊( 質(zhì)量比 30︰1) ,將兩片 PVDF 壓電薄膜用雙面膠粘貼在 PDMS 正方體塊的兩個相對側(cè)面,支撐零件采用 PLA 材料通過 3D 打印制作,PDMS 正方體塊和支撐零件用雙面膠連接。然后,在組合體外部依次固化一層質(zhì)量比 30︰1 的 PDMS 和一層質(zhì)量比 10︰1 的 PDMS,傳感器樣機如圖 2 所示。
為了測試傳感器對振動信號的感知能力及兩個 PVDF 壓電薄膜產(chǎn)生信號的一致性,搭建如圖 3 所示實驗平臺,將傳感器的支撐連接件與壓力計連接,并通過其施加 2 N 正壓力。將五種材料之一的美紋紙固定在直線模組的滑塊上,隨滑塊以 v = 10 mm/ s 的速度滑動,電荷放大器通過同軸電纜與 PVDF 壓電薄膜連接,采集 PVDF 產(chǎn)生的電荷信號。
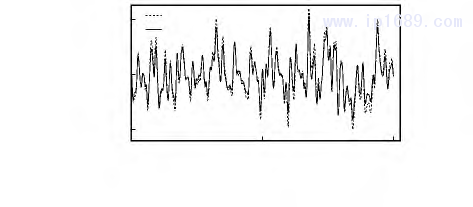
由于采集到的振動信號包含工頻干擾,對其利用二階巴特沃斯濾波器進行濾波處理后的時域信號,如圖 4 所示。從圖 4 可知,兩個傳感元件上采集的振動信號具有極高的一致性,這表明,當兩個傳感元件中一個失效或性能不良 時,傳感器仍舊可以依靠另一個傳感元件正常工作,這對于 傳感器耐用性和信號采集的有效性是十分必要的。
3實驗驗證
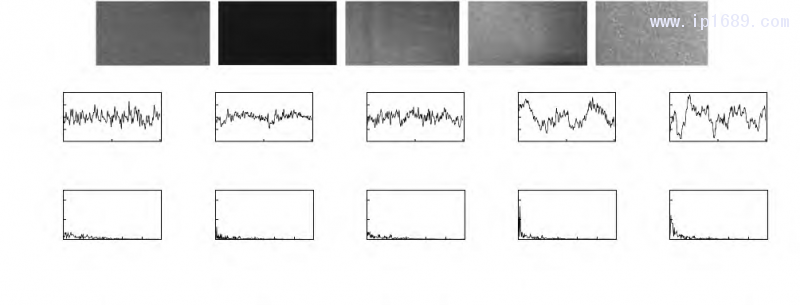
對傳感器進行材質(zhì)識別性能測試,選取美紋紙、手機屏 幕、海綿、毛氈、泡沫五種物體進行實驗,圖 5 ( a) 從左至右依次為這五種物體表面圖像,實驗時,令傳感器在每種物體表面分別滑動 20 次,每次滑動 4 s,記錄傳感器檢測的振動信號,截取滑動過程中的信號較平穩(wěn)的第二秒和第三秒信 號進行分析,由于 2 只 PVDF 傳感器一致性較強,因此選擇其中一個傳感器檢測到的振動信號進行濾波、快速傅里葉 變換、提取特征值的分析,得到各物體表面振動產(chǎn)生的時域 信號( 圖 5( b) ) 和頻域信號( 圖 5( c) ) 。由圖 5( c) 可知,信號振動頻率主要集中于30 Hz以下,所以從頻域信號中提取特征值時只考慮 30 Hz 以下部分。
為了通過特征值進行分類識別,在每一種物體表面振動信號中,分別提取時域信號的均值、方差、偏度、峰度和頻 域信號的最大幅值共五個特征值,另外,將頻域信號按頻率分為 1 ~ 10,11 ~ 20,21 ~ 30 Hz 三部分,提取每部分的均值及方差共六個特征值,即每次滑動實驗數(shù)據(jù)提取 11 個特征值作為分類依據(jù),對五種材料進行分類識別。分別采用線 性支持向量機( linear SVM) 和 K 最近鄰( K-nearest neigh- bour,KNN) 分類算法( K = 3,5,7,9,11,13) ,使用十折交叉驗證對算法進行測試,結(jié)果如表 1 所示。
Linear SVM 3NN 5NN 7NN 9NN 11NN 13NN
時域特征 95 94 94 92 93 94 91
頻域特征 95 95 94 94 96 95 96
時頻域特征 97 98 98 98 98 97 97
根據(jù)表 1 可知,線性支持向量機和 KNN 算法對五種材質(zhì)的分類識別準確率均達到 90 % 以上,將時域特征和頻域特征結(jié)合后的分類識別準確率均高于單獨使用兩類特征的分類識別準確率。
4結(jié)束語
本文通過模仿人體手指結(jié)構(gòu),設(shè)計制作了一種基于PVDF 壓電材料的仿生柔性觸覺傳感器,在對傳感器測試之后進行了材質(zhì)識別實驗。實驗結(jié)果顯示,利用滑動過程 中產(chǎn)生振動信號的特征值結(jié)合分類算法可以實現(xiàn)材質(zhì)識別 的功能,識別準確率達到 90 % 以上。
參考文獻:
[1] 劉少強,黃惟一,王愛民,等. 機器人觸覺傳感技術(shù)研發(fā)的歷史現(xiàn)狀與趨勢[J]. 機器人,2002( 4) : 362 - 366,374.
[2] SILVERA-TAWIL D ,RYE D,VELonAKI M. Artificial skin and tactile sensing for socially interactive robots: A review[J]. Robo- tics and Autonomous Systems,2015,63: 230 - 243
[3] LIANG Z,CHANG G,WANG Z,et al. Novel tactile sensor tech- nology and smart tactile sensing systems: A review[J]. Sensors, 2017,17( 11) : 2653 - 2676.
[4] XIN Y ,SUN H ,TIAN H ,et al. The use of polyvinylidene fluoride( PVDF) films as sensors for vibration measurement: A brief review[J]. Ferroelectrics,2016,502( 1) : 28 - 42.
[5] 胡吉永. 基于觸覺認知的織物質(zhì)感的形成機理研究[D]. 上海: 東華大學,2008.
[6] 盧天健,徐峰. 皮膚的力學性能概述[J]. 力學進展,2008( 4) :393 - 426.
[7] JOHNSON K O,YOSHIOKA T,VVGA-BERMUDEZ F. Tactilefunctions of mechanoreceptive afferents innervating the hand[J]. Journal of Clinical Neurophysiology,2000,17( 6) : 539 - 558.
[8] YI Z,ZHANG Y,PETERS J. Bioinspired tactile sensor for surface roughness discrimination[J]. Sensors and Actuators A: Physical, 2017,255: 46 - 53.























 玻纖含量對長玻纖...
玻纖含量對長玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入...