王 丹1 薛 凱1 龐 博2
(1.天華化工機械及自動化研究設計院有限公司;2.沈陽透平機械股份有限公司)
摘要 介紹了BOPET薄膜回收造粒系統的結構和工作原理,針對系統中傳統控制模式存在的問題,引入了PID控制算法和模糊控制算法。實際應用結果表明:機組上料輸送不穩定、切割壓實機料位不穩定的問題均得到了解決,電機電流控制在120A±6%,成品物料粒子質量滿足要求。
關鍵詞 模糊控制 PID控制 BOPET薄膜 回收造粒 切割壓實機 料位 電機電流
聚對苯二甲酸乙二酯(PET)是一種高度可回收的塑料樹脂,于1941年由杜邦公司的化學家在北美首次合成[1]。PET經過雙向拉伸法可以制成 BOPET薄膜,該膜具有強度高、光學性能好、產能大、生產效率高及可回收等優勢,在隔膜、建材、包裝和印刷領域被廣泛應用[2]。在BOPET薄膜工業生產中,為降低成本和能耗,保護環境防止污染,普遍使用回收造粒系統對破膜和邊膜進行回收造粒并重復利用,使之產生良好的社會和經濟效益[3]。其中,薄膜回收造粒系統的一項關鍵技術就是控制切割壓實機進料。因生產線是連續生產的,必須保證連續定量進料。當進料量少于擠出機的出料量時,回收機拉條會變細,甚至斷條,影響產品產量和生產進度;當進料量多于擠出機的出料量時,物料會堆積在壓實料倉,造成物料溫度過高、物料結塊,嚴重時會導致壓實機過載,造成巨大的經濟損失。為了精準控制切割壓實機的進料量,筆者提出一種BOPET薄膜回收造粒機組自動喂料控制改進方法,希望為解決行業中的類似問題提供一定的參考借鑒。
1 薄膜回收造粒系統
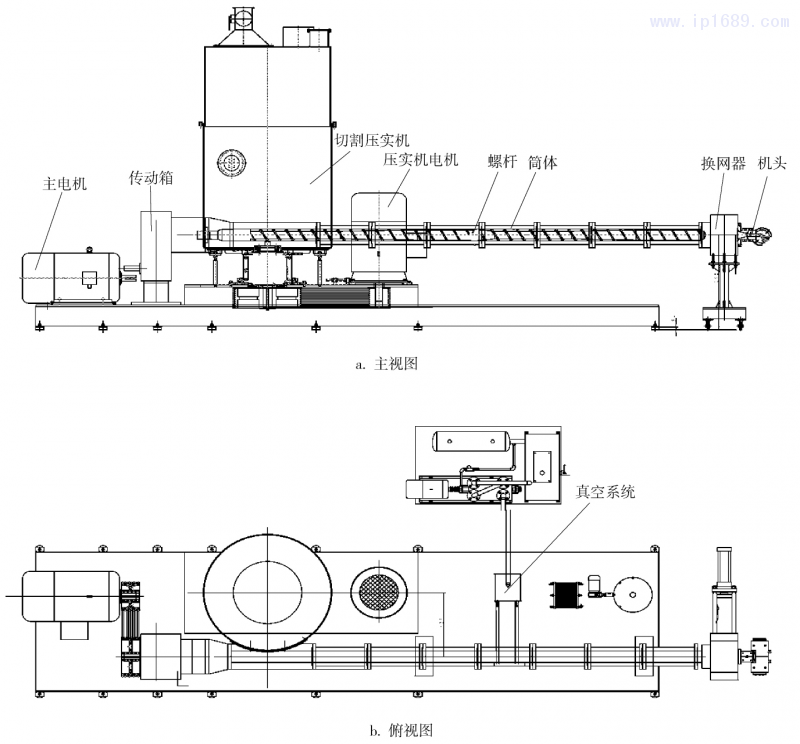
薄膜回收造粒系統(圖1)主要由破碎機 、破碎料倉、原料輸送機、切割壓實機、單螺桿擠出機、換網器和切粒機組成。
圖 1 薄膜回收造粒系統示意圖
BOPET薄膜雙向拉伸生產線產生的破膜和邊膜經過破碎機在線粉碎后被存儲在破碎料倉中。破碎料具有堆積密度大、含水量高和輸送不均勻的特點,因此無法通過傳統方式直接喂料進入擠出機進行造粒。為此,在實際生產中引入切割壓實環節,破碎料先通過原料輸送機輸送到壓實機料倉內,在旋轉刀盤切刀與破碎料的相互作用下產生摩擦熱,薄膜碎片受熱后卷曲收縮使堆密度不斷增加。同時,在壓實機旋轉刀盤高速旋轉離心力的作用下,破碎料被不斷壓實。單螺桿擠出機的進料口經過特殊設計,與壓實機料倉側面對接,從而使被壓實的破碎料不斷被推入擠出機,進而被擠出機螺桿帶走,進行熔體造粒。
2 傳統控制模式存在的問題
在薄膜回收造粒系統中,為確保進入擠出機的物料均勻穩定,必須使壓實機中的破碎料保持在一定的料位。然而,切割壓實機料倉的刀盤高速旋轉,破碎料堆密度低,各種形式的料位計都無法準確、直接地測量料倉的實際料位。經觀察發現,壓實機料位與壓實機電機負載密切相關,隨著原料料位的不斷增加,原料重量增加,進而使壓實機電機負載增大,有功電流增加,且成正相關關系,因此可采用電機的有功電流來間接反映壓實機內的料位。
傳統的控制模式是采用超馳控制方法,即設定一個電機電流的高限,當壓實機電機電流超過高限電流時,表明壓實機料倉滿倉,這時輸送電機停轉,上游料倉不再送料;當壓實機電機電流低于高限電流時,表明壓實機料倉空倉,這時輸送電機運轉連續送料[3]。然而該控制模式存在一定的弊端,剛輸送進切割壓實機的物料較輕,沒有被壓實,不會迅速引起壓實機電流的變化,存在一定的滯后性。在實際生產過程中,滯后性將導致切割壓實機電機電流大幅振蕩,振幅可達壓實機額定電流的15%左右。這種不穩定會造成后續擠出機進料不穩定,扭矩上下波動幅度大,熔體擠出拉條粗細不均,粒子大小間歇性變化,嚴重影響成品質量。
3 控制方法改進
3.1 PID控制算法
以天華化工機械及自動化研究設計院有限公司(以下簡稱天華院)DJ-120單螺桿擠出機為研究對象,引入PID控制算法。首先將物料輸送電機改為變頻調速電機,通過調節電機轉速,使物料的輸送量連續可調節。根據輸送電機轉速與切割壓實機電機電流變化的動態關系,以切割壓實機電機電流設定值與實際值的偏差e作為PID控制器的輸入變量,以控制器的輸出控制量u來控制輸送電機轉速,得到切割壓實機電機電流曲線如圖2所示,可以看出,切割壓實機電機由于傳統控制模式導致電流波動大的現象得到了明顯改善,在穩定狀態下,電機電流基本保持在設定電流120A的±9%以內。
圖2 引入PID控制算法后的壓實機電機電流曲線
然而,碎膜非常蓬松,導致上游破碎料倉容易“架橋”,輸送電機的轉速與實際物料的輸送量無法呈現良好的線性關系,有時較低的轉速也會帶來大批的物料。另外,由于PID控制器中的微分器對系統中的噪聲會有放大作用,因此會導致輸出大幅變動,造成壓實機電機電流仍會每隔一段時間就出現不穩定的情況,嚴重時甚至需要人工干預。
3.2 模糊控制算法
為進一步提高控制質量,消除噪聲干擾,保證電機電流穩定,對PID參數采用動態化調節,即對于不同的偏差程度采取不同的PID控制參數,以提高控制響應速度,為此筆者引入模糊控制算法。模糊控制算法是以模糊集合理論、模糊規則語言變量和模糊邏輯推理為基礎的計算機智能控制方法,可以透過模糊化將原本0和1的二值化控制轉變成0~1之間的數值,相對于原本非0即1的二分法,模糊控制算法更加接近人類的思維。雖然模糊控制算法的輸入、輸出均是模糊的,但透過解模糊化的步驟,即可得到精確的輸出值。
利用模糊集合理論可以將專家知識或操作人員經驗對應的語言規則直接轉換為自動控制策略。通常的方法是使用模糊規則查詢表,用語言知識模型來設計和修正控制算法[4]。設模糊PID控制器的輸入變量為切割壓實機電機電流偏差e和偏差變化率ec,輸出變量為比例系數Kp和積分系數Ki,得到改進后的模糊PID控制器結構框圖如圖3所示。
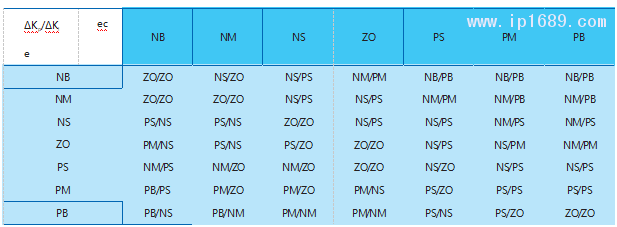
模糊規則語言變量為[NB,NM,NS,ZO,PS, PM,PB],根據PID控制算法參數整定的經驗建立模糊控制規則表(表1)。
表1 模糊控制規則表
運行過程中,將輸入參數e和ec模糊化,然后通過查詢模糊控制規則表并經過解模糊化后,輸出參數ΔKp 和ΔKi。
經過模糊控制算法修正后的PID控制器參數為:
Kp=Kp0+ΔKp
Ki=Ki0+ΔKi
其中,Kp0、Ki0為PID控制器的初始比例系數和積分系數。實際應用中,模糊控制規則采用IF-THEN方式,其結構簡單,易于修改和掌握,比較適合PLC編程實現。
4 應用效果
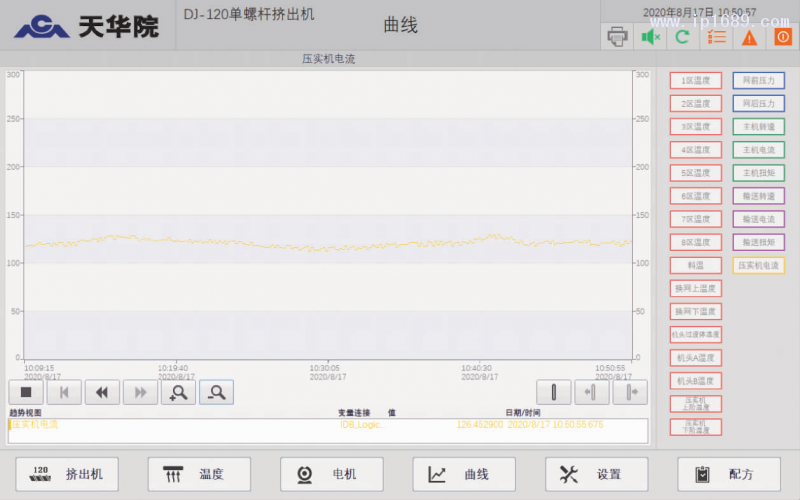
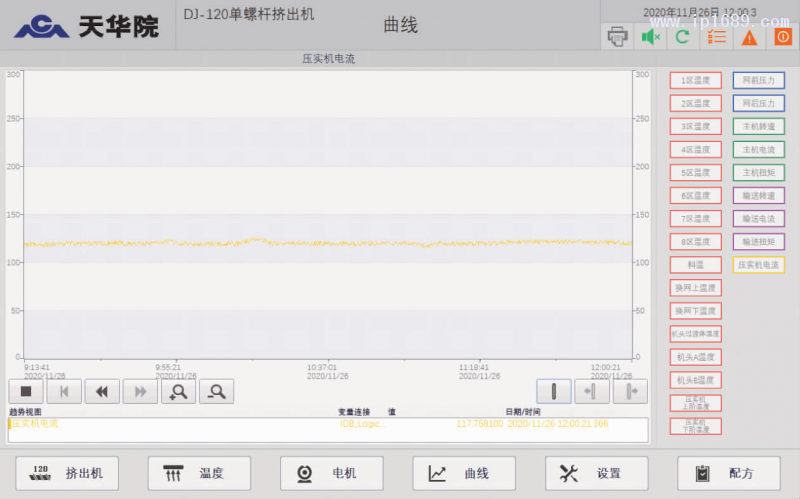
圖4為引入模糊控制算法后的壓實機電機電流曲線,可以看出,壓實機電機電流保持在120A左右,由原料輸送機不穩定造成的電流波動大幅減弱,其中最大電流126.3A,最小電流116.7A,波動范圍在±6%以內。由破碎料輸送機不穩定所帶來的干擾被大幅減弱,在一定范圍內壓實機電機可以長期平穩運行,壓實機內液位可以保持一定的穩定性。
圖4 引入模糊控制算法后的壓實機電機電流曲線
壓實機內料位的穩定使得造粒擠出機進料均勻,長期保持動態穩定進料,擠出機主電機扭矩長期保持穩定運行。對造粒機出料口進行隨機采樣,如圖5所示,可以看出物料粒子均勻穩定,消除了此前粒子大小每隔一段時間就會發生周期性變化的問題。
圖5 物料粒子實物圖
綜上所述,通過PID控制器調節破碎料輸送機,并結合模糊控制算法,在破碎料進料控制中取得了滿意的效果。
5 結束語
PID調節喂料量并結合模糊控制算法控制切割壓實機料位的方式目前已經應用在BOPET薄膜回收生產線中,解決了進料系統大滯后、非線性等多種因素共同影響造成的控制難點。該生產線目前運行穩定,生產的回收顆粒質量良好,批次質量穩定,使用維護成本低,在客戶現場已長時間平穩運行,得到了客戶的好評和肯定。
參考文獻
[1] Tennant D J.Manufactu re of Highly Polymeric Sub-stances[P] .US:US2465150A,1949-03-22.
[2] 馮樹銘 .PET薄膜雙向拉伸技術及發展方向[J] . 聚酯工業,2009,22(2):1~3,31.
[3] 張國強 ,馬永金 .BOPET廢膜再生技術開發[J].橡塑技術與裝備,2017,43(16):16~19.
[4] 王芳,潘春榮.基于IGA優化模糊PID的堆垛機控制系統研究[J].制造業自動化,2020,42(11):82~86,106.























 玻纖含量對長玻纖...
玻纖含量對長玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫療干粉吸入...
聚砜醫療干粉吸入...