吳陸順
亞普汽車部件股份有限公司,江蘇揚州 225009
摘 要:基于機器人技術的汽車塑料油箱修邊系統是由抓取機器人、條碼機、修邊臺、修邊機器人、稱重臺等幾個主要部件構成,實現了自動從吹塑機取出吹塑完成帶飛邊的油箱,粘貼追溯條碼,完成飛邊修剪,最后稱重掃描錄入數據庫的功能,降低了生產成本,提高了過程的穩定性和產品一致性,保證了產品的質量。
關鍵詞:塑料油箱;機器人應用;自動化生產線;系統工程
01 塑料油箱自動化修邊背景
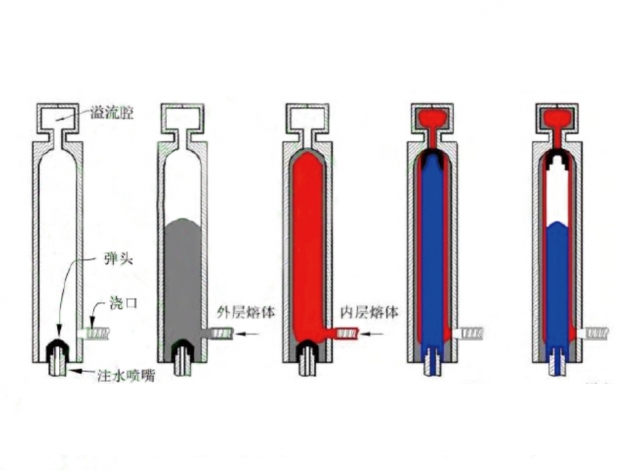
汽車塑料燃油箱以其重量輕、安全性能好、防腐蝕、抗沖擊、使用壽命長和較大的設計自由度獲得了客戶的廣泛認可,其箱體材料一般為HDPE以及用于阻隔層的EVOH。隨著環境保護意識的增強,相關的政策和法規對汽車制造企業提出了越來越嚴格的蒸發排放要求。為了減少碳氫化合物向箱體外揮發,實現低排放目標,最新的工藝采用將燃油箱上焊接和裝配的組件放置到燃油箱內部的方法。
塑料油箱由型坯在左右半模的型腔中被吹塑定型而成,成型后的油箱在環繞合模線周邊帶有溢料,形成合模線飛邊;此外,油箱側壁的焊接管口也存在管口飛邊。飛邊需要通過修邊刀具機構進行切除。傳統的切除方式為人工把持塑料油箱,將飛邊對準修邊刀具進行切除。這種修邊方式生產效率低,操作人員勞動強度大、技能要求高;且剛成型后的塑料油箱溫度較高,操作不便,人工修邊的產品無法保證在狀態上的一致性,經常會在修邊過程中發生產品報廢。人工修邊的方式已不能滿足當今市場對產品質量和生產效率的要求。
機器人和控制技術的持續發展使機器人技術的應用范圍日益廣泛。柔性機器人不僅在汽車零部件制造方面,而且在優化生產工藝流程和生產靈活性方面發揮越來越重要的作用。多個機器人可以協同工作,例如一起加工零件以縮短循環時間,或者共同抬起重物[1]。而現今的機器人幾乎無所不能:搬運、堆垛、檢驗、拋光或者研磨。結合新的抓夾技術和傳感器技術,使過去無法想象的機器人應用成為現實。
02 自動化修邊生產線需求分析
生產過程中,塑料油箱由型坯吹塑成型后,產品周邊帶有溢料形成飛邊,切除飛邊就成了塑料油箱生產不可避免的一道工序。為實現自動化生產,需要實現以下功能:
(1)油箱抓取
塑料油箱在吹塑機里吹塑冷卻成型后,通過水平機械手從模具中取出,抓取機器人需要在機械手張開前抓住懸在半空的油箱。同時,由于剛出來的油箱仍有較高的溫度,飛邊比較軟,在重力作用下容易向下彎折粘在油箱表面,造成產品報廢,因此需要抓取夾具增加隔離擋 板,防止此缺陷產生。
(2)條碼打印及粘貼
為了實現產品精確追溯,作為油箱身份證的條碼必不可少。條碼號需由MES系統訂單生成,通過打印機打印后自動粘貼在油箱指定位置。
(3)油箱飛邊去除
飛邊占據油箱哈夫線3/4周長,修邊時要求去除全部飛邊,不能有毛刺,不能切割到油箱哈夫線。落下的飛邊需要自動收集,冷卻后送至粉碎機粉碎后回收使用。
(4)油箱重量采集
重量作為油箱關鍵質量數據之一,需要和條碼號進行綁定,錄入到MES系統數據庫里。
(5)周期需求
油箱生產周期為93s,因此整個系統周期需短于此時間,才能保證連續穩定運行。
03 自動化修邊生產線設計與實現
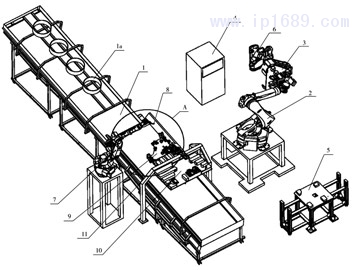
如圖1所示,塑料油箱自動化修邊生產線由飛邊輸送線、抓取機器人、油箱抓取夾具、條碼機、稱重臺、修邊機器人、修邊刀、修邊靠模、緩沖靠模構成。
抓取機器人選用KUKA KR210機器人,A6軸法蘭處裝有油箱仿形的抓取夾具機構,采用背面靠模進行定位,用吸盤、側邊夾緊氣缸進行夾緊固定,外側裝有略低于哈夫線的飛邊隔離擋板,防止飛邊彎折與油箱粘連。條碼機、修邊臺、稱重臺都處于抓取機器人的工作行程范圍內,以實現夾持油箱運動至各工位[2]。
運行時,油箱從吹塑機上吹塑成型,由水平機械手從模具內夾取出來,懸于半空中,抓取機器人帶動油箱夾具貼近油箱,油箱的三個側壁被夾具靠模定位,側邊夾緊氣缸動作,固定油箱,然后打開吸盤真空閥,吸附油箱底部,防止其在運動時掉落。當抓取并固定住油箱后,機器人發信號給吹塑機,吹塑機張開水平機械手夾具。檢測到機械手張開到位信號后,抓取機器人運行至貼條碼工位。
條碼機采用具有網絡接口的打印粘貼一體機,一卷條碼和色帶可打印3000張條碼,避免頻繁更換。條碼號由MES系統通過網絡自動下發,按序列進行打印。機器人夾持油箱至打印工位特定位置,發送打印指令,條碼機打印條碼后,通過真空吸附剝離的條碼,由氣缸前進粘貼至油箱指定位置上。然后發送打印完成信號,抓取機器人運行至修邊工位。
由于生產周期限制,抓取機器人不能等修邊完成后再搬運至下一工位,因此增加了緩沖靠模。抓取機器人先把油箱放置在緩沖靠模上,再將上個周期已經完成修邊的油箱放到修邊臺上,然后返回來將緩沖靠模上的油箱放入修邊臺,最后返回等待位,準備抓取下一只吹塑完成的油箱。這樣就有效地提升了系統的效率,保證連續穩定運行。
抓取機器人離開修邊區域后,會發送已離開信號給修邊機器人,修邊機器人即開始沿著通過示教設定的軌跡切除飛邊。修邊刀由夾具和刀片兩部分組成,便于更換;同時要求刀片的鋒線處于機器人A6軸的旋轉軸線上,這樣便于在油箱上彎曲的哈夫線處運動。由于修邊機器人與抓取機器人運動軌跡在空間上有一部分重合,需要對其碰撞進行防護[3]。一般可以使用機器人的空間監控和程序信號進行邏輯保護,同時在機器人程序中設定中斷,只要同時進入公共空間,則兩個機器人立即停止運行。切除的飛邊掉落在修邊臺下方的飛邊輸送線1上,通過裝在上面的冷卻風扇冷卻后送入粉碎機進行回收利用。為了使熱的飛邊得到充分的冷卻,采用了二層輸送線的結構,使得整個輸送線行程變長,增加了冷卻時間。
修邊后的油箱由抓取機器人放入稱重臺上,當機器人離開后,稱重臺底板下的電子秤由氣缸托起,對油箱進行稱重檢測,延遲5s左右,待重量穩定后,下方的條碼掃描儀掃描讀取條碼數據,發送至MES系統,MES通過串口讀取當前的油箱重量值,與條碼數據一起記錄到數據庫中。
4結語
工業4.0時代下,制造業領域都在快速朝著智能制造發展。汽車行業作為制造業的重要角色之一,一直追求自動化、數字化、網聯化,以期提高生產效率和降低產品成本。通過采用機器人技術,實現了汽車塑料油箱自動修邊系統,提高了過程的穩定性和產品一致性,保證了產品的質量,降低了油箱的生產制造成本。同時將信息采集錄入MES系統,實現了產品的精確追溯,也為后續數據分析奠定了基礎。
參考文獻
[1] 陳文兵.機器人在汽車零部件行業中的應用實例——機器人
作業自動化生產線[J].科技創新與應用,2014 (22):42.
[2] 陳英.工業機器人在沖壓自動化生產線中的應用分析[J].自動化
與儀器儀表,2016(10):73-74,76.
[3] 王厚勇,張文佳,辛磊磊,等.機器人與自動化技術在生產線智
能化改造中的應用[J].汽車工藝師,2017(3):24-27.





















 玻纖含量對長玻纖...
玻纖含量對長玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫療干粉吸入...
聚砜醫療干粉吸入...