郝用興①② 張旭浩① 劉亞輝①
(①華北水利水電大學(xué),河南 鄭州450045;②河南省數(shù)字化智能裝備工程研究中心,河南 鄭州450064)
摘要:將壁厚減薄率和橢圓率作為管材自由彎曲成形結(jié)果的評價指標(biāo),選取彎曲模與管材間隙值、彎曲模圓角半徑值、管材彎曲變形區(qū)長度、導(dǎo)向機構(gòu)圓角半徑值、導(dǎo)向機構(gòu)與管材間隙值作為影響因子。利用數(shù)值模擬方法對管材自由彎曲成形結(jié)果的評價指標(biāo)和影響因子建立樣本庫,并隨機選取6組作為測試樣本,其余的作為訓(xùn)練樣本,結(jié)合BP神經(jīng)網(wǎng)絡(luò)和鵜鶘優(yōu)化算法對預(yù)測模型進行訓(xùn)練,構(gòu)建POA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測模型對管材自由彎曲成形結(jié)果進行預(yù)測。結(jié)果表明,POA-BP預(yù)測模型的壁厚減薄率和橢圓率的最大預(yù)測誤差不超過2%,故POA-BP預(yù)測模型能夠有效預(yù)測管材成形結(jié)果。
關(guān)鍵詞:管材;自由彎曲;評價指標(biāo);神經(jīng)網(wǎng)絡(luò);預(yù)測
彎管零件能夠從材料和結(jié)構(gòu)滿足產(chǎn)品輕量化、強韌化、低耗環(huán)保的需求,因此在航空、航天、船舶、汽車、醫(yī)療和能源等高技術(shù)產(chǎn)業(yè)得到了日益廣泛的發(fā)展和應(yīng)用[1]。
許多學(xué)者研究了管材彎曲過程中的起皺、管壁變薄、截面變形和回彈預(yù)測與控制等問題。田娥和劉婧瑤等[2−3]通過建立BP神經(jīng)網(wǎng)絡(luò)有效預(yù)測彎管成形的回彈量;Zhang S等[4]將管材三維回彈預(yù)測轉(zhuǎn)化為二維問題,建立了平面回彈前后半徑的數(shù)學(xué)關(guān)系,利用幾何連續(xù)性和修正函數(shù)進行補償,建立了可靠的三維變曲率管彎曲回彈預(yù)測數(shù)學(xué)模型;陳光耀等[5]使用RBF神經(jīng)網(wǎng)絡(luò)預(yù)測管材數(shù)控(NC)彎曲的壁厚減薄率和回彈程度,并利用支持向量機(SVM)預(yù)測管材的起皺情況,從而實現(xiàn)了回彈的預(yù)測和成形質(zhì)量的提高;賈美慧等[6]通過粒子群算法優(yōu)化的RBF神經(jīng)網(wǎng)絡(luò)實現(xiàn)了對管材彎曲的多目標(biāo)工藝參數(shù)優(yōu)化;Wu J J等[7]利用擴展卡爾曼濾波算法得出了管材成形的運動模型和觀測模型,最終預(yù)測了成形軌跡并優(yōu)化了加工參數(shù),證明了加工優(yōu)化方案的有效性;趙陽等[8]構(gòu)建了MPSO-BP神經(jīng)網(wǎng)絡(luò)預(yù)測模型,用于小半徑彎管成形結(jié)果的快速預(yù)測,并證明該模型的預(yù)測結(jié)果可靠有效。
目前針對管材自由彎曲的成形結(jié)果研究,徐振華等[9]通過解析法和有限元模擬相結(jié)合的方法預(yù)測管材自由彎曲的回彈數(shù)值,相較于傳統(tǒng)預(yù)測方式提升了11.08%的精度;Li Y S等[10]的研究關(guān)注AL6061管材自由彎曲過程中的回彈現(xiàn)象,采用有限元和解析法進行研究,并通過添加中性層偏移來優(yōu)化管材彎曲回彈的解析模型。另外,對管材彎曲成形結(jié)果的有效預(yù)測可以幫助相關(guān)生產(chǎn)部門及時評估成形品質(zhì)的優(yōu)劣,并為選擇適當(dāng)?shù)募庸?shù)提供有效的參考,對于推進自由彎曲成形技術(shù)的工程化具有重要意義。
本文選用外徑為12mm,壁厚為1mm的TP2銅管,綜合采用理論分析、數(shù)值模擬和神經(jīng)網(wǎng)絡(luò)等方法。通過數(shù)值模擬建立樣本庫,并基于BP神經(jīng)網(wǎng)絡(luò)建立管材自由彎曲成形結(jié)果的預(yù)測模型,使用鵜鶘優(yōu)化算法優(yōu)化預(yù)測模型的權(quán)值和閾值,提高預(yù)測精度,最終實現(xiàn)POA-BP預(yù)測模型對TP2管材三維自由彎曲成形結(jié)果的預(yù)測。
1管材三維自由彎曲
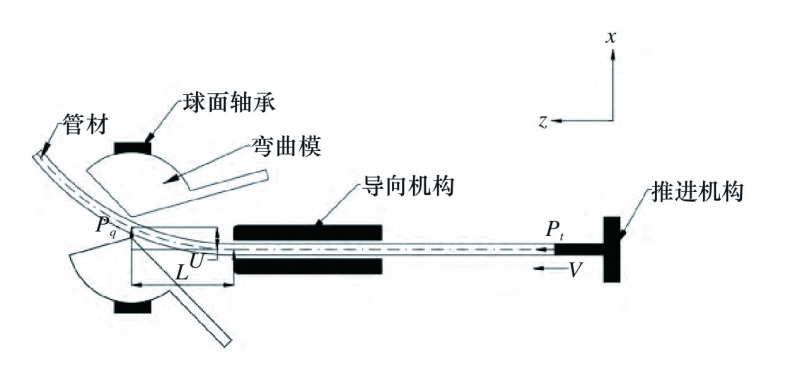
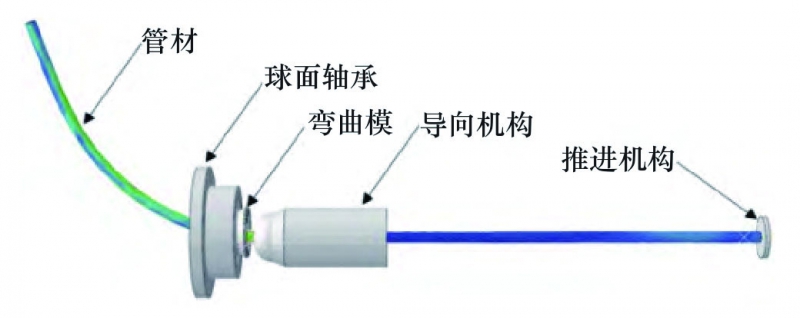
圖1所示為管材三維自由彎曲的成形簡圖。在未成形時,管材與各個成形構(gòu)件處于同一軸線上。開始成形時,管材在推進機構(gòu)的作用下,沿著Z軸方向移動,導(dǎo)向機構(gòu)在整個成形過程中對管材起著支撐的作用。球面軸承由兩個伺服電機驅(qū)動,實現(xiàn)在XY平面內(nèi)的自由移動,帶動彎曲模的偏移和旋轉(zhuǎn)。管材通過成形構(gòu)件的共同作用,在空間范圍內(nèi)實現(xiàn)自由彎曲。
圖1 管材三維自由彎曲成形簡圖
2管材力學(xué)性能測試與自由彎曲有限元仿真
2.1管材力學(xué)性能測試
為了準確地進行管材有限元仿真,需要獲取管材的力學(xué)性能參數(shù),管材選擇ψ12mm,壁厚1mm的TP2銅管。用專用夾具塞頭放置在管材兩端[11],防止拉伸過程其變形。通過萬能試驗機對TP2銅管進行3次各向同性的拉伸試驗(圖2),取3次試驗的平均值。經(jīng)過拉伸試驗后,得到的TP2銅管的材料參數(shù),見表1。
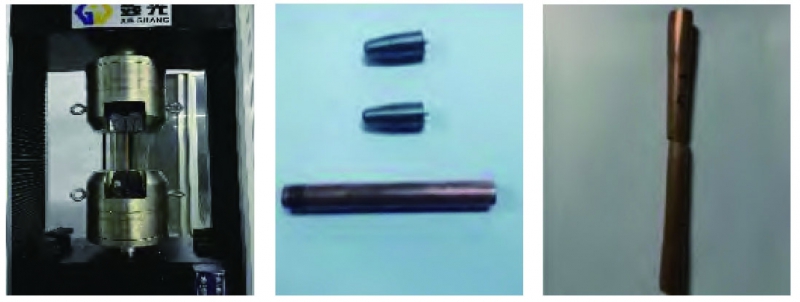
(a)萬能試驗機(b)試樣與塞頭(c)斷管圖2 拉伸試驗
表1 TP2銅管材料參數(shù)
材彈性階段的本構(gòu)關(guān)系為
σ=Eε
因為管材在彎曲成形過程中存在加工硬化現(xiàn)象,所以使用冪指數(shù)硬化模型來描述管材的塑性變形部分。
σ=Eεn+b
其中:b為TP2銅管的初始屈服應(yīng)力。
TP2管材的塑性階段采用冪指數(shù)硬化模型,并通過擬合曲線(圖3)表示。
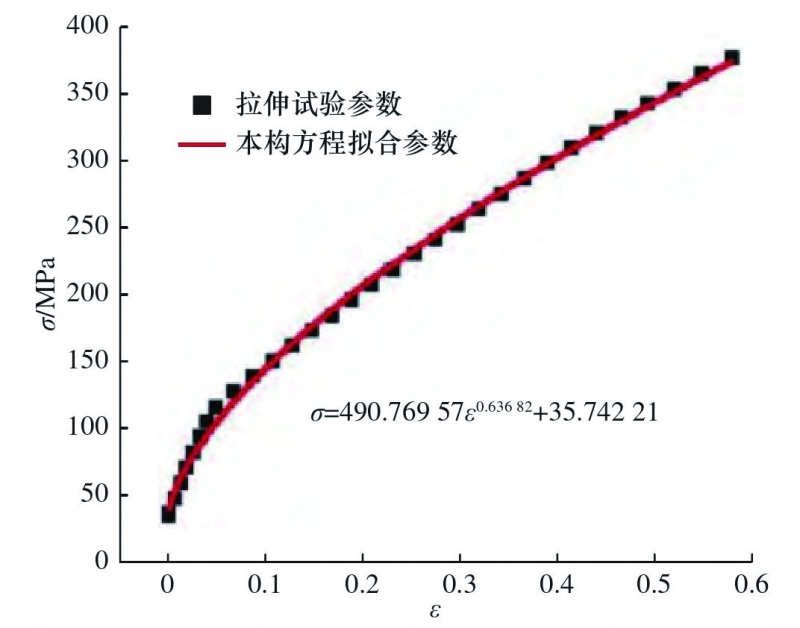
圖3 σ−ε擬合曲線
2.2管材自由彎曲有限元模擬
Abaqus有限元分析軟件中使用Abaqus/Explicit求解器,建立了如圖4所示的三維有限元模型來模擬管材的彎曲過程。為了提高仿真效率和結(jié)果準確性,設(shè)置了質(zhì)量縮放系數(shù)為25、摩擦系數(shù)為0.05,并采用通用接觸來模擬管材的彎曲成形過程。該模型中,管材被定義為可變形實體,并采用S4R通用殼單元進行網(wǎng)格劃分。球面軸承、彎曲模、導(dǎo)向機構(gòu)和推進機構(gòu)則被定義為離散剛體。彎曲模部分采用C3D8R單元進行網(wǎng)格劃分,而導(dǎo)向機構(gòu)等其他剛體模型則采用R3D4單元進行網(wǎng)格劃分。各部件的網(wǎng)格劃分如圖5所示。
圖4 管材自由彎曲有限元模型
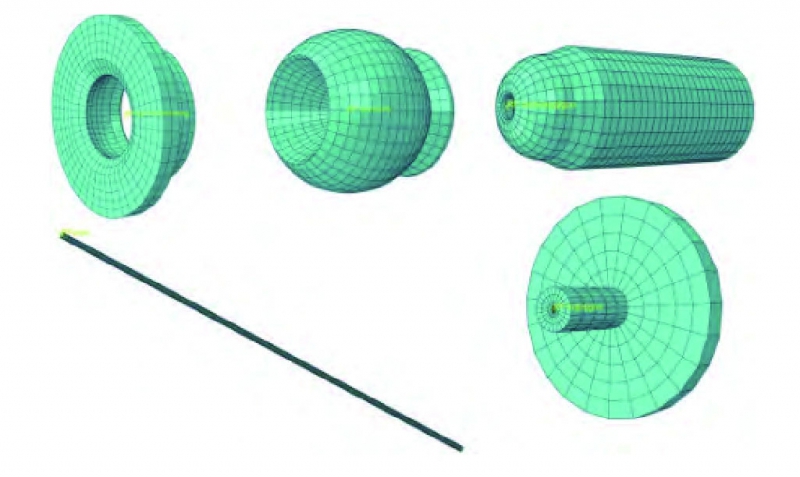
圖5 各部件網(wǎng)格劃分
管材成形結(jié)果質(zhì)量的評價指標(biāo)為管材壁厚減薄率δ和管材橢圓率ε為
(3)
式中:t為管材的初始壁厚;tmin為管材經(jīng)過彎曲后的最小壁厚。當(dāng)管材的壁厚減薄率不超過10%時,即認為其質(zhì)量良好。(4)
式中:Dmax表示管材經(jīng)過彎曲后的最大截面直徑;Dmin表示管材經(jīng)過彎曲后的最小截面直徑。在工業(yè)方面,銅管的橢圓率是要求不超過8%的。
3數(shù)值模擬有效性驗證及訓(xùn)練樣本和測試樣本生成
3.1數(shù)值模擬有效性驗證
為了確保管材自由彎曲數(shù)值模擬和實際加工相吻合,需要對管材成形數(shù)值模擬進行驗證,以確保其有效性。
在有限元軟件中,設(shè)置推進機構(gòu)的推進速度為120mm/s、導(dǎo)向機構(gòu)圓角半徑為2mm、導(dǎo)向機構(gòu)與管材間隙為0.3mm、彎曲模圓角半徑為2mm、彎曲模與管材間隙為0.1mm、彎曲變形區(qū)長度為24mm、X軸的偏移量為0mm、6mm、0mm,Y軸偏移量為5mm、0mm、7mm,一共有3個彎曲段。
在實際加工過程中,考慮到不可控因素,設(shè)置主要參數(shù)推進機構(gòu)的推進速度為120mm/s,X軸和Y軸的偏移量與數(shù)值模擬一致。
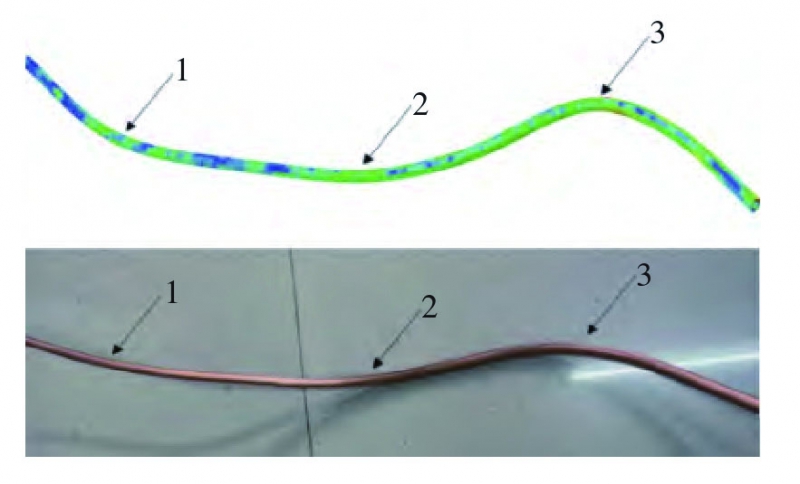
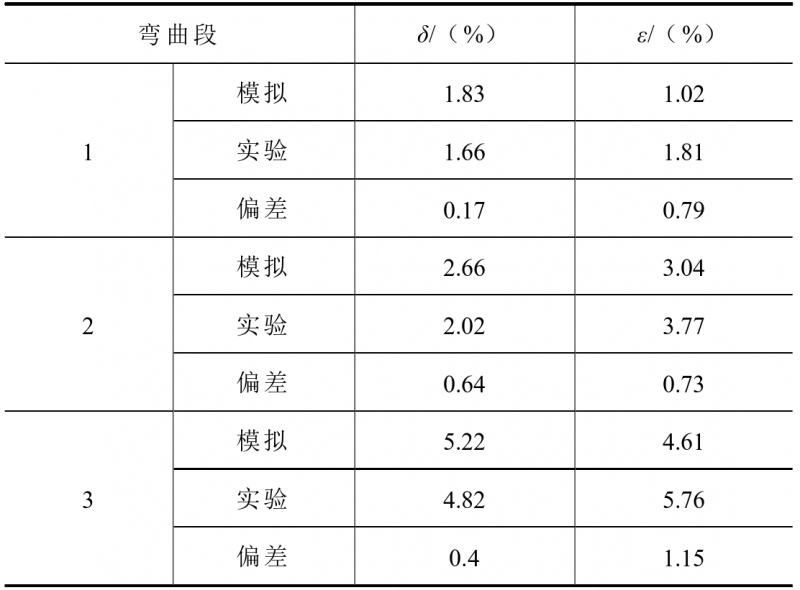
最終的仿真結(jié)果和實驗結(jié)果如圖6所示,兩者的幾何形狀較為吻合。3個彎曲段的壁厚減薄率和橢圓率對比結(jié)果見表2,可以看出成形結(jié)果均符合評價指標(biāo),且這3個彎曲段的最大壁厚減薄率偏差為0.64%,最大橢圓率偏差為1.15%,管材成形質(zhì)量較好,故管材成形數(shù)值模擬有效。
圖6 模擬(上)與實驗(下)彎曲成形結(jié)果對比
表2 模擬和實驗結(jié)果對比
3.2訓(xùn)練和預(yù)測樣本生成
相較于傳統(tǒng)的實驗加工方法,使用貼近實際加工的數(shù)值模擬可用于研究管材自由彎曲成形,同時也減少了物理實驗和成本的需求。基于經(jīng)過驗證的有限元仿真模型和工廠加工實際情況,最終確定彎曲模與管材間隙值A(chǔ)1、彎曲模圓角半徑值A(chǔ)2、管材彎曲變形區(qū)長度A3、導(dǎo)向機構(gòu)圓角半徑值A(chǔ)4、導(dǎo)向A5機構(gòu)與管材間隙值作為神經(jīng)網(wǎng)絡(luò)預(yù)測模型的輸入層節(jié)點。壁厚減薄率δ和橢圓率ε作為神經(jīng)網(wǎng)絡(luò)預(yù)測模型輸出層節(jié)點。
根據(jù)實際加工和數(shù)值模擬分析結(jié)果,確定以下主要影響因素的取值范圍為:彎曲模與管材間隙值A(chǔ)1為0.1~0.3mm、彎曲模圓角半徑值A(chǔ)2為1.5~2.5mm、管材彎曲變形區(qū)長度A3為21~25mm、導(dǎo)向機構(gòu)圓角半徑值A(chǔ)4為1.5~2.5mm、導(dǎo)向機構(gòu)與管材間隙值A(chǔ)5為0.2~0.4mm,其他參數(shù)根據(jù)實際加工情況進行設(shè)定。
根據(jù)影響因素的取值范圍分散選取36組加工參數(shù),通過數(shù)值模擬對36組加工參數(shù)進行成形,從中隨機選取6組作為測試樣本,剩下的30組作為訓(xùn)練樣本。
4 POA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測模型
4.1 BP神經(jīng)網(wǎng)絡(luò)及鵜鶘優(yōu)化算法
4.1.1 BP神經(jīng)網(wǎng)絡(luò)
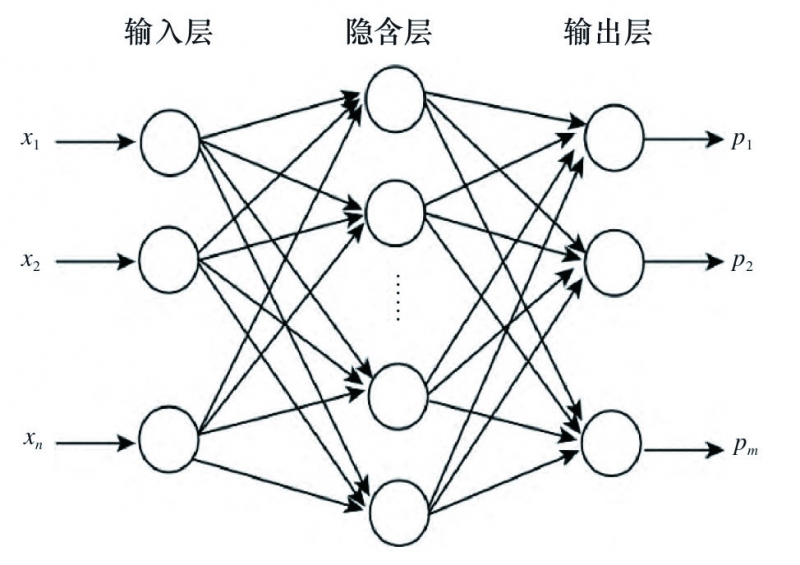
人工神經(jīng)網(wǎng)絡(luò)可處理多變量非線性優(yōu)化問題并逼近任何函數(shù)。BP神經(jīng)網(wǎng)絡(luò)是一種具有多層節(jié)點的前饋神經(jīng)網(wǎng)絡(luò),它使用誤差逆向傳播算法來進行訓(xùn)練,它具有良好的非線性函數(shù)逼近能力和時變性,常用于處理多變量非線性優(yōu)化問題,網(wǎng)絡(luò)拓撲結(jié)構(gòu)包括輸入層、隱含層和輸出層,且三層或以上的結(jié)構(gòu)可以逼近大多數(shù)的非線性函數(shù)[12],如圖7所示。
圖7 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
由于BP神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)訓(xùn)練開始時,網(wǎng)絡(luò)的結(jié)構(gòu)參數(shù)是隨機給定的,會出現(xiàn)網(wǎng)絡(luò)的收斂速度較慢、不穩(wěn)定且容易陷入局部最小值的困境,導(dǎo)致最大相對誤差存在,從而影響網(wǎng)絡(luò)的性能和預(yù)測準確性。
4.1.2鵜鶘優(yōu)化算法
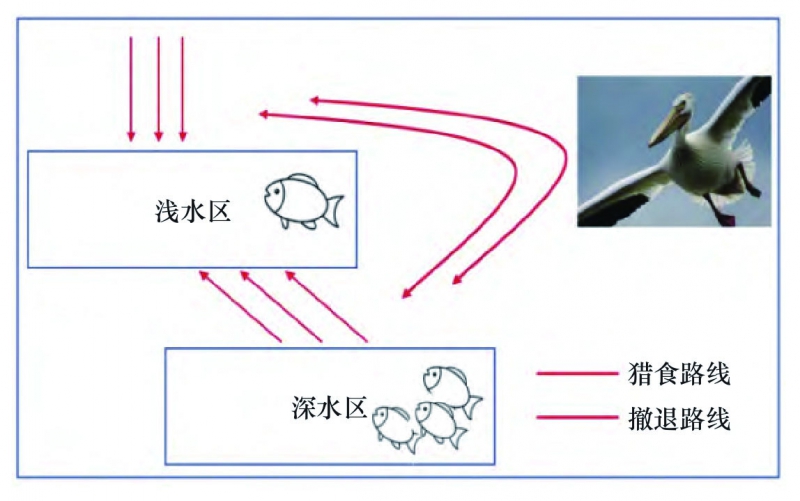
鵜鶘優(yōu)化算法(pelican optimization algorithm,POA)是由Pavel Trojovský和Mohammad Dehghani在2022年提出的[13],該算法模擬了鵜鶘在狩獵過程中的自然行為,通過模擬鵜鶘鳥在覓食過程中的搜索策略和動態(tài)調(diào)整能力,來解決優(yōu)化問題,如圖8所示。該算法將優(yōu)化問題轉(zhuǎn)化為參數(shù)搜索的過程。在算法的迭代過程中,每個鵜鶘個體代表一個解,根據(jù)當(dāng)前解的適應(yīng)度值進行搜索和更新,通過合作與信息共享,個體之間共同尋找最優(yōu)解。通過不斷迭代搜索和位置調(diào)整,鵜鶘優(yōu)化算法能夠逐漸收斂到全局最優(yōu)解,為解決實際問題提供了一種高效而靈活的優(yōu)化方法。
圖8 鵜鶘捕獵的方式
鶘優(yōu)化算法是模擬鵜鶘在攻擊和捕獵獵物時的行為和策略,以更新候選解,該狩獵策略分為探索和開發(fā)兩個階段進行模擬,其數(shù)學(xué)模型如下:
(1)初始化
鵜鶘種群初始化數(shù)學(xué)描述如下:
 (5)
(5)式中:xi,j為第i個鵜鶘的第維的位置;N為鵜鶘的種群數(shù)量;m為求解問題的維度;rand是[0,1]范圍內(nèi)的隨機數(shù);uj和lj分別是求解問題的第j維的上下邊界。在鵜鶘優(yōu)化算法中,求解問題的目標(biāo)函數(shù)可以用來計算鵜鶘的目標(biāo)函數(shù)值;鵜鶘種群的目標(biāo)函數(shù)值用向量(6)
式中:F為鵜鶘種群的目標(biāo)函數(shù)向量;Fi為第i個鵜鶘的目標(biāo)函數(shù)值;Xi表示為Xi=[ xi,1 … xi,j … xi,m ]1*m,為第i個鵜鶘的位置。
(2)逼近獵物(探索階段)
在探索階段,鵜鶘確定獵物位置并向其移動,通過對鵜鶘策略建模,掃描搜索空間并利用POA發(fā)現(xiàn)不同區(qū)域。該算法的關(guān)鍵是獵物位置在搜索空間中隨機生成,增強了精確搜索的能力。這些概念和鵜鶘的移動策略可以用數(shù)學(xué)模型式(7)來表示。
 (7)
(7)
式中:xp1i,j是第i個鵜鶘在第j維上基于探索階段的新狀態(tài);Pj是獵物在第j維上的位置;Fp是獵物的目標(biāo)函數(shù)值;Fi為第i個鵜鶘的目標(biāo)函數(shù)值;I是為1或2的隨機數(shù)。對于每次迭代和每個成員,這個參數(shù)是隨機選擇的。當(dāng)這個參數(shù)的值等于2時,它會為一個成員帶來更多的位移,這可能會將該成員帶到搜索空間的新區(qū)域。因此,參數(shù)影響POA的探測能力,從而精確掃描搜索空間。
水面飛行,捕捉獵物(開發(fā)階段)
在開發(fā)階段,當(dāng)鵜鶘達到水面時,展開翅膀驅(qū)趕獵物向上移動,并將其收集在喉袋中。這種策略使更多的獵物在攻擊區(qū)域被捕獲。通過對鵜鶘行為建模,POA能更好地收斂到狩獵區(qū)域的優(yōu)質(zhì)點,提高了本地搜索和開發(fā)能力。算法需要檢查鵜鶘周圍的點,以找到更好的解。鵜鶘的捕獵行為可以通過式(8)進行數(shù)學(xué)模擬。
 (8)
(8)
式中:xP2i,j是第i個鵜鶘基于開發(fā)階段在j維上的新狀態(tài);R(1- )為xi,j的鄰域半徑,R為常數(shù)0.2,t為當(dāng)前迭代次數(shù),T為最大迭代次數(shù),系數(shù)R(1- )表示種群成員的鄰域半徑,用于在每個成員附近進行局部搜索,以收斂到一個更好的解。隨著算法的進行,該系數(shù)逐漸減小,導(dǎo)致成員的鄰域半徑縮小,這樣可以以更小、更精確的步驟掃描每個成員周圍的區(qū)域,使得算法能夠更接近全局最優(yōu)解。
經(jīng)過上述的搜索和捕獲過程后,鵜鶘會再次攻擊和捕獵,即進行迭代計算。不斷更新最優(yōu)位置,鵜鶘群需要不斷地進行位置更新。根據(jù)上述得到的設(shè)計變量和目標(biāo)函數(shù)值的新選擇,用新得到的最優(yōu)位置替換原來的最優(yōu)位置,然后繼續(xù)迭代計算,直到找到最優(yōu)解。迭代停止并輸出最終的計算結(jié)果。
4.1.3POA-BP預(yù)測模型設(shè)計
根據(jù)BP神經(jīng)網(wǎng)絡(luò)和鵜鶘優(yōu)化算法的數(shù)學(xué)模型,建立管材自由彎曲成形結(jié)果預(yù)測模型的步驟如下。
(1)通過Mapminmax函數(shù)對管材自由彎曲成形結(jié)果和輸入?yún)?shù)進行歸一化處理。利用標(biāo)準BP神經(jīng)網(wǎng)絡(luò)建立預(yù)測模型,并設(shè)定學(xué)習(xí)速率、學(xué)習(xí)目標(biāo)、最大迭代次數(shù)、動量因子和激活函數(shù)。根據(jù)經(jīng)驗公式(9),選擇適當(dāng)數(shù)量的隱含層節(jié)點來確定BP神經(jīng)網(wǎng)絡(luò)的拓撲結(jié)構(gòu)[14]。
 (9)
(9)
式中:w為隱含層節(jié)點數(shù);n為輸入層節(jié)點數(shù);v為輸出層節(jié)點數(shù);z為1~10的常數(shù)。
(2)初始化鵜鶘種群規(guī)模N、最大迭代次數(shù)T、搜索空間維度m等基本參數(shù)。管材自由彎曲成形結(jié)果預(yù)測模型中自變量的個數(shù)o為
 (10)
(10)
(3)將BP神經(jīng)網(wǎng)絡(luò)的權(quán)重和閾值作為鵜鶘個體的參數(shù)。對于每個個體,隨機初始化權(quán)重和閾值,并將其作為解的一部分。BP神經(jīng)網(wǎng)絡(luò)的均方誤差(MSE)作為鵜鶘優(yōu)化算法的適應(yīng)度函數(shù),表示為
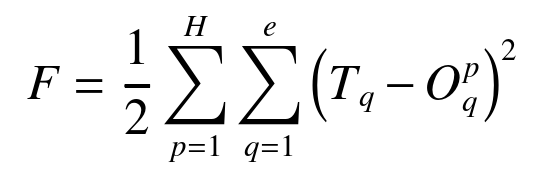 (11)
(11)
式中:F為適應(yīng)度函數(shù);Tq為第q項值的期望輸出,q=1,…,e,e為訓(xùn)練樣本總數(shù);Oq 為第q項值第p次迭代后的網(wǎng)絡(luò)輸出;H為總迭代次數(shù),p=1,…,H。
根據(jù)上述公式計算得到最優(yōu)鵜鶘個體捕捉獵物的位置,并將其存儲在Xi中。
(4)根據(jù)種群的新狀態(tài)和目標(biāo)函數(shù)的值,將最佳的捕食位置Xi,j 方案不斷地更新,得到最佳的定位方案即到達目標(biāo)精度或是最大迭代次數(shù),否則將會重復(fù)步驟(3)。
(5)將最佳結(jié)果的值賦予BP神經(jīng)網(wǎng)絡(luò)的權(quán)重和閾值,通過這些優(yōu)化后的權(quán)值和閾值再次訓(xùn)練神經(jīng)網(wǎng)絡(luò),直至達到目標(biāo)精度或是最大迭代次數(shù)。
(6)通過步驟(5)得到的管材自由彎曲成形結(jié)果預(yù)測模型,輸入新的數(shù)據(jù)即可完成成形結(jié)果的預(yù)測。
4.2管材成形結(jié)果預(yù)測模型建立
4.2.1BP神經(jīng)網(wǎng)絡(luò)預(yù)測模型
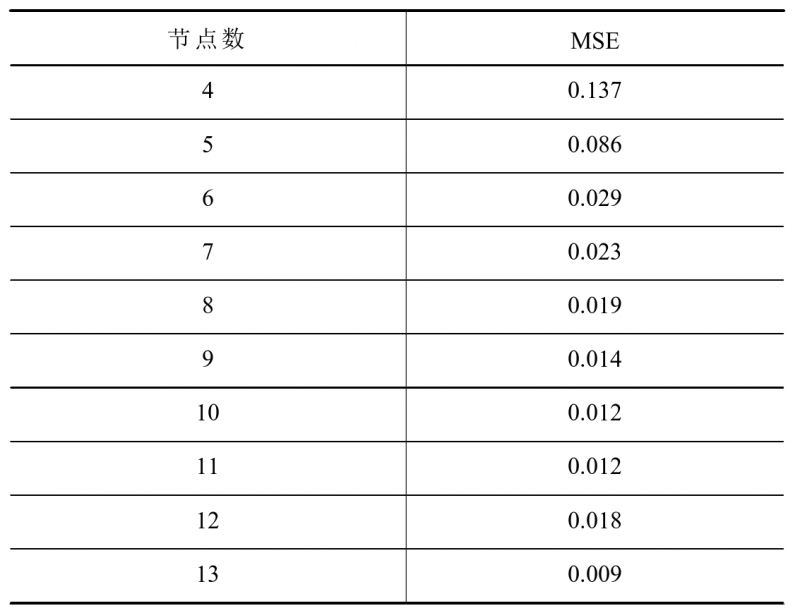
根據(jù)3.2節(jié)建立的訓(xùn)練和預(yù)測樣本,構(gòu)建3層拓撲結(jié)構(gòu)的BP神經(jīng)網(wǎng)絡(luò),輸入層節(jié)點數(shù)為5,輸出層節(jié)點數(shù)為2,隱含層采用tansing激活函數(shù),輸出層采用purelin激活函數(shù),采用梯度下降動量和自適應(yīng)學(xué)習(xí)率算法traingdx進行訓(xùn)練,目標(biāo)誤差為0.0001,學(xué)習(xí)率為0.05,動量因子為0.4,最大迭代次數(shù)為800。由式(10)可以得出隱含層節(jié)點數(shù)的可能取值范圍為4~13,依次將不同的隱含層節(jié)點數(shù)代入訓(xùn)練計算得出均方誤差,結(jié)果見表3,可知當(dāng)隱含層節(jié)點數(shù)為13的時候,訓(xùn)練誤差取得最小值,故5-13-2拓撲結(jié)構(gòu)下的BP神經(jīng)網(wǎng)絡(luò)的預(yù)測精度最高。
表3 不同隱含層節(jié)點數(shù)訓(xùn)練得到的MSE
為了深入研究具有穩(wěn)定性和收斂速度快的預(yù)測模型,避免BP神經(jīng)網(wǎng)絡(luò)陷入局部最優(yōu)解,需要對該BP模型進行改進。
4.2.2POA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測模型
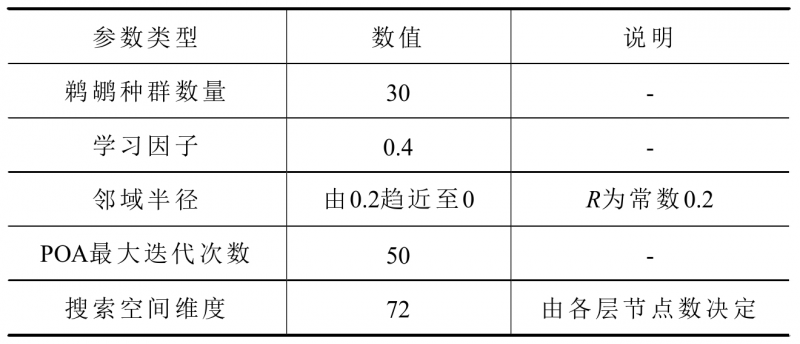
根據(jù)4.2.1小節(jié)確定的BP神經(jīng)網(wǎng)絡(luò)拓撲結(jié)構(gòu)和查閱相關(guān)資料,設(shè)置鵜鶘優(yōu)化算法的基本參數(shù)見表4。
表4 鵜鶘優(yōu)化算法基本參數(shù)
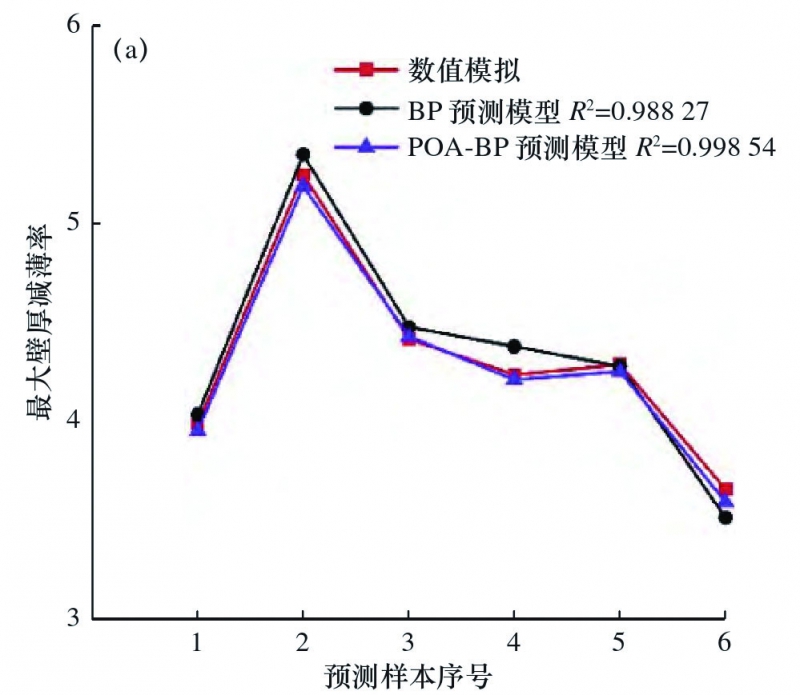
通過30組訓(xùn)練樣本對POA-BP神經(jīng)網(wǎng)絡(luò)進行訓(xùn)練,建立POA-BP神經(jīng)網(wǎng)絡(luò)預(yù)測模型,對6組預(yù)測樣本進行預(yù)測,與BP預(yù)測模型的結(jié)果進行對比,如表5和圖9所示,可知POA-BP預(yù)測模型的壁厚減薄率誤差I(lǐng)t和橢圓率誤差I(lǐng)d最大不超過2%;另外,POA-BP預(yù)測模型的決定系數(shù)高達0.99854和0.99737,不僅高于BP神經(jīng)網(wǎng)絡(luò)且更接近于1,故該神經(jīng)網(wǎng)絡(luò)模型的預(yù)測準確性和擬合性能均優(yōu)于BP神經(jīng)網(wǎng)絡(luò)。
表5 BP模型、POA-BP模型的預(yù)測結(jié)果與數(shù)值模擬結(jié)果對比
圖9 數(shù)值模擬、BP預(yù)測模型、POA-BP預(yù)測模型結(jié)果對比圖
4.2.3 POA-BP預(yù)測模型實驗對比驗證
由于本文神經(jīng)網(wǎng)絡(luò)的訓(xùn)練樣本是基于數(shù)值模擬的,所以為了驗證POA-BP預(yù)測模型在管材實際加工過程中的有效性,將隨機選取的6組預(yù)測樣本的加工參數(shù)通過管材三維自由彎曲成形設(shè)備進行實驗,并使用手持式三維掃描儀對成形后的管材進行掃描和后處理,以測量其各參數(shù)值,如圖10所示。將成形后的結(jié)果與POA-BP預(yù)測模型的結(jié)果進行對比,結(jié)果見表6。
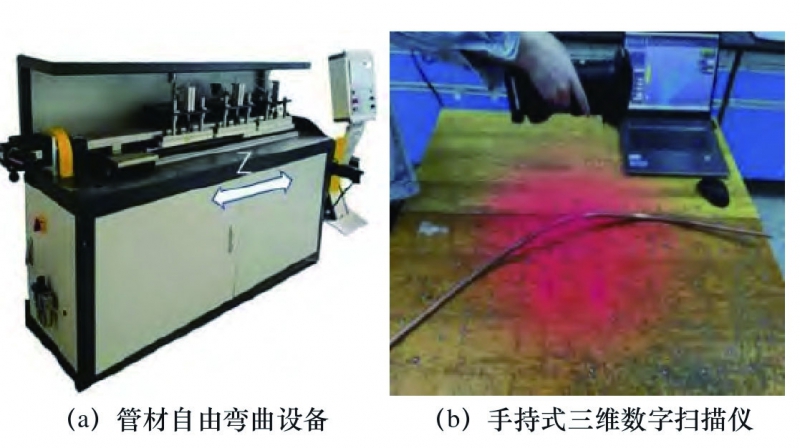
圖10 實驗設(shè)備
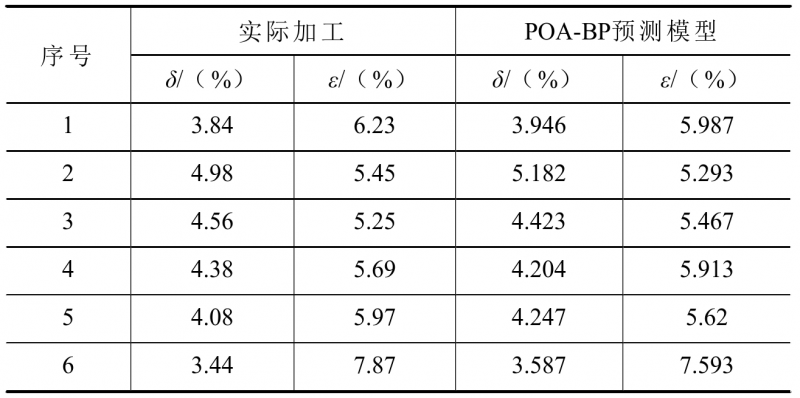
表6 實際加工與POA-BP預(yù)測模型結(jié)果對比
從表6可以看出,POA-BP模型的預(yù)測結(jié)果與實際加工的成形結(jié)果吻合度較好,說明POA-BP模型可以有效地預(yù)測實際加工的成形結(jié)果,也進一步驗證了數(shù)值模擬的有效性。
5結(jié)語
(1)管材的加工參數(shù)和成形結(jié)果之間沒有直接的函數(shù)關(guān)系,因此增加了準確預(yù)測管材成形結(jié)果的難度。在實際管材加工中,準確預(yù)測成形結(jié)果對生產(chǎn)部門至關(guān)重要。它能幫助生產(chǎn)部門及時評估成形結(jié)果的質(zhì)量,并為選擇合適的加工參數(shù)提供有價值的指導(dǎo)。
(2)通過鵜鶘優(yōu)化算法優(yōu)化后的BP神經(jīng)網(wǎng)絡(luò)模型具有更高的收斂性能、更好的擬合程度、更強的穩(wěn)定性能,有效地改善了標(biāo)準BP神經(jīng)網(wǎng)絡(luò)容易陷入局部最優(yōu)解的問題;研究表明,POA-BP預(yù)測模型的壁厚減薄率和橢圓率的最大誤差不超過2%,故采用POA-BP神經(jīng)網(wǎng)絡(luò)模型可以準確地預(yù)測管材自由彎曲的成形結(jié)果。
(3)通過對6組預(yù)測樣本進行實際加工并與預(yù)測模型結(jié)果對比,驗證了POA-BP預(yù)測模型在管材自由彎曲成形預(yù)測方面的實際價值。
參考文獻
楊合,李恒,張志勇,等. 彎管成形理論和技術(shù)研究進展與發(fā)展趨勢 (英文)[J]. Chinese Journal of Aeronautics,2012,25(1):1-12.
田娥,孫建東,劉自萍,等. 基于BP神經(jīng)網(wǎng)絡(luò)的彎管機回彈量預(yù)測[J]. 現(xiàn)代制造工程,2016(3):70-73.
劉婧瑤,唐承統(tǒng),寧汝新. 管材數(shù)控繞彎回彈實驗研究及BP網(wǎng)絡(luò)預(yù) 測模型[J]. 塑性工程學(xué)報,2009,16(6):85-90.
Zhang S,Wu J. Springback prediction of three-dimensional variable curvature tube bending[J]. Advances in Mechanical Engineering,2016, 8(3):1687814016637327.
陳光耀,李恒,賀子芮,等. 基于機器學(xué)習(xí)的管材彎曲回彈有效預(yù)測 與補償[J]. 中國機械工程,2020,31(22):2745-2752.
賈美慧,王成林,孫衛(wèi)華. 基于神經(jīng)網(wǎng)絡(luò)和粒子群算法的管材彎曲工 藝參數(shù)優(yōu)化[J]. 制造業(yè)自動化,2014,36(24):109-113.
Wu J J,Liang B,Yang J Z. Trajectory prediction of three-dimensional forming tube based on Kalman filter[J]. The International Journal of Advanced Manufacturing Technology,2022,121:5235-5254.
趙陽,劉俊,唐文勇,等. 基于MPSO-BP模型的小半徑彎管成形結(jié)果 快速預(yù)測[J]. 塑性工程學(xué)報,2018,25(3):122-128.
徐振華,王華,洪榮晶,等. 基于自由彎曲技術(shù)的管材彎曲回彈預(yù)測 [J/OL]. 計算機集成制造系統(tǒng):1-19[2023-04-07]. http://kns.cnki.net/kcms/ detail/11.5946.tp.20221024.0900.002.html.
Li Y S,Li A D,Yue Z M,et al. Springback prediction of AL6061 pipe in free bending process based on finite element and analytic methods[J]. The International Journal of Advanced Manufacturing Technology,2020,109: 1789-1799.
郝用興,張少華,劉亞輝. 基于數(shù)值模擬的管材三維自由彎曲成形規(guī) 律研究[J]. 制造業(yè)自動化,2021,43(11):101-104.
Jia W K,Zhao D A,Shen T,et al. An optimized classification algorithm by BP neural network based on PLS and HCA[J]. Applied Intelligence, 2015,43:176-191.
Trojovský P,Dehghani M. Pelican optimization algorithm:A novel nature inspired algorithm for engineering applications[J]. Sensors,2022,22(3): 855.
Yong W,F(xiàn)eng S J. The dynamic model prediction study of the forest disease,insect pest and rat based on BP neural networks[J]. Journal of Agricultural Science,2011,4(3):291-297.























 玻纖含量對長玻纖...
玻纖含量對長玻纖... 鈣鈦礦薄膜的均勻...
鈣鈦礦薄膜的均勻... 用于光伏板靜電除...
用于光伏板靜電除... 聚砜醫(yī)療干粉吸入...
聚砜醫(yī)療干粉吸入...